(1) 参赛作品名称:立体货架盘点无人机系统
(2)参赛成员:
姓名 | 班级 | 所学专业 | 所在学院 |
胡景超 | 机器人232 | 机器人工程 | 自动化学院 |
姚正俣 | 机器人212 | 机器人工程 | 自动化学院 |
邓云鹏 | 电子222 | 电子信息工程 | 自动化学院 |
(3)指导教师:曲延华、教授、智能控制
(4)获奖等级:省级一等奖
(5)比赛名称:全国大学生电子设计竞赛
(6)比赛简介:全国大学生电子设计竞赛是教育部和工业和信息化部共同发起的大学生学科竞赛之一,是面向大学生的群众性科技活动,目的在于推动高等学校促进信息与电子类学科课程体系和课程内容的改革。竞赛的特点是与高等学校相关专业的课程体系和课程内容改革密切结合,以推动其课程教学、教学改革和实验室建设工作。自1994年创办以来,旨在推动中国产学研合作发展,培养优秀电子设计人才。参赛学生增长到每年的4万人左右,已成为中国规模最大、参赛范围最广、极具行业影响力和含金量的针对在校本专科大学生的学科竞赛。
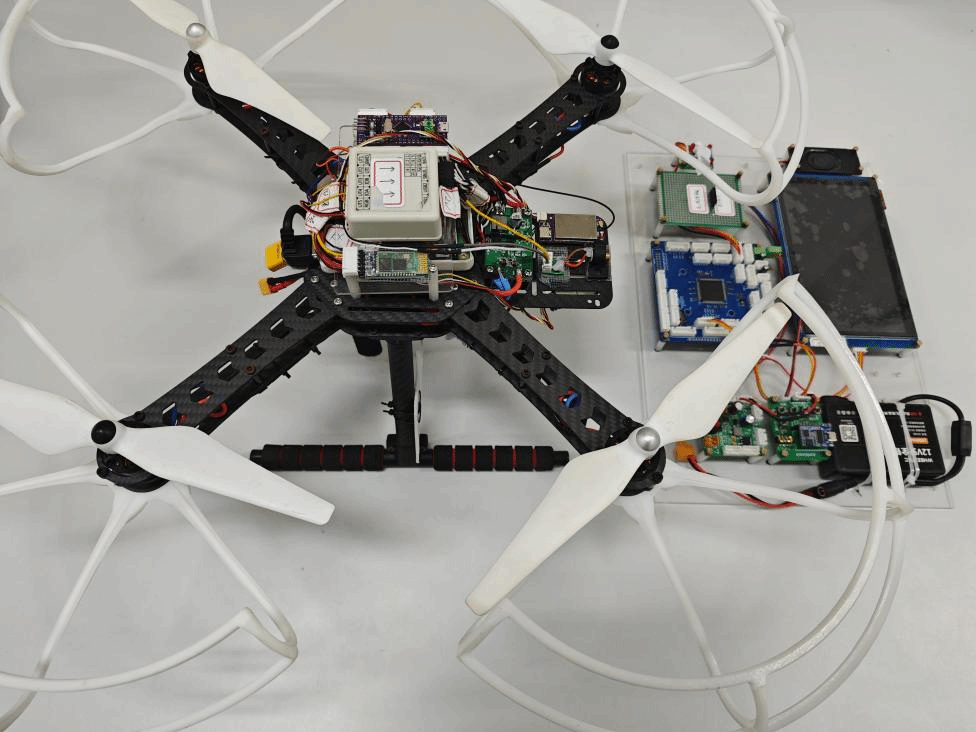
(7)比赛作品简介:本系统是一个立体支架盘点无人机系统,由多旋翼飞行器(即盘点无人机)和无线地面站组成。可实现仓库中立体货架货物的自主巡检、盘点。系统采用 STM32F407VET6 作为主控,通过蓝牙模块实现无线通信。地面站以 STM32 最小系统版为核心,配备 LCD 触摸屏显示器,能实时显示盘点结果。仓库内设有起飞点和降落点,两个双面立体货架共 24 个货物二维码张贴位。同时集成激光模块、视觉模块及超声波模块,完成货物精准盘点。
(8)作品亮点:该作品通过融合磁力计等多种传感器数据,依据不同条件实现姿态的动态精准修正,确保无人机能够精准定高至 150 厘米,并按照预定路径对货架货物开展高效盘点。其利用树莓派运行 Opencv,达成了二维码的快速且准确识别。在通信方面,借助蓝牙和串口收发数据包,成功构建了地面站、飞控以及树莓派之间的三端稳定通信链路,使得在识别操作完成后,地面站能够及时反馈相关信息。所有代码采用模块化编程方式并依托 FreeRTOS 的时间片调度机制,使得整个系统在运行过程中表现出高度的可靠性和流畅性
(9)指导教师简介:曲延华,教授,研究生导师。多年从事智能控制、故障诊断等方面科研工作。承担省级教研、科研项目7项。近三年指导学生参加各种学科竞赛及项目,获省级奖项5项。